ВИСШЕ ТРАНСПОРТНО УЧИЛИЩЕ „ТОДОР КАБЛЕШКОВ”-гр.СОФИЯ
Факултет
„Комуникации и електрообзавеждане в транспорта”
Катедра
„Електроснабдяване и електрообзавеждане в транспорта”
ДИПЛОМНА РАБОТА
Тема: „Физически модел на електромобил за
висока проходимост”
Научен ръководител: доц. д-р инж. Иван Миленов
Дипломант: инж. Явор Здравков Исаев
Специалност: „Електроенергетика и електрообзавеждане в транспорта”
Група: 2782
Факултетен №: 102276
Дата на задаване: 26.09.2011 г.
Срок за предаване: 20.01.2012 г.

СЪДЪРЖАНИЕ
Увод......................................................................................................
1.Изисквания към автомобил с висока
проходимост Техически характеристики
2. Теоретична
част проектиране и изработване на
физичен модел на автомобил с висока проходимост.
2.1 Проектиране и изработка на зхаранване.
2.2 Проектиране
и изработка на възобновяеми изсточници на енергия с дистанционно управление.
2.3 Проектиране
и изработка на електрическа система за промяна на клиренса.
2.4Проектиране
и изработка на стъклопочистващо устройство с датчик за автоматично и
принудително включване.
2.5
Проектиране и изработка на устройство за изтегляне на атомобила в авариини
ситуации(лебедка).
2.6 Проектиране
и изработка на автоматично включване и превключване на LED светлините за нощно
виждане.
2.7 Проектиране и изработка на стоп светлини
,светлина за заден ход.
2.8Проектиране и изработка на алармена система.
2.9 Проектиране
и изработка на система за автоматична проверка на системите преди стартиране с
LED индикатор за изправност.
2.10Проектиране и изработка на електрически
диференциал .
2.11 Проектиране и изработка на система против
подхлъзване.
2.12 Проектиране и изработка на система против
боксуване.
2.13 Проектиране и изработка на антиблокираща
система.
2.14 Проектиране и изработка на индикатор за
мощност.
2.15 Проектиране и изработка на спитачна
система.
2.16 Проектиране и изработка на индикатор за
прегряване.
2.17 Проектиране и изработка на устройство за
принудително зареждане от мрежата.
2.18 Проектиране и изработка на Модули за
управление и конвертори.
2.19 Проектиране и изработка на шаси.
2.20 Проектиране на ходова част.
2.21 Проектиране на окачване.
2.22 Проектиране на задвижването .
2.23 Проектиране и изработка на кормилната
уредба.
2.24 Проектиране , оразмеряване и изработка на
силовите вериги.
2.25 Проектиране , оразмеряване и изработка на
оперативните вериги.
2.26 Проектиране и изработка на пасивно и
активно охлаждане.
2.27 Проектиране
и изработка на повърхностни дтайли(калници , врати , предна и задна маска, капаци
, таван, дифузьори , решетки , огледала.
2.28 Проектиране и изработка на предпазни
ролбари.
2.29 Проектиране и изработка на дистанционно
управление.
2.30 Проектиранеи изработка на джанти и гуми.
3.Изпитване на модела
3.1 Проходимост.
3.2 Спирачен път.
3.3 Ускорение.
3.4 Автономия.
4. Инструкция за експлоатация
5 Материална база
6 Доставчици
Литература и нормативни документи
Приложение
1
Приложение
2
Приложение
3
УВОД
С оглед на напредването на технологиите и все по усиленото навлизане на електромобилите в ежедневието. Прилагам проектиран и изработен физичен модел на електромобил с висока проходимост.С оглед на икономикосъобразното положение приложеният от мен физичен модел е в мащаб 10:1.
ИЗИСКВАНИЯ КЪМ АВТОМОБИЛ С ВИСОКА ПРОХОДИМОСТ
ТЕХНИЧЕСКИ ХАРАКТЕРИСТИКИ
Мащаб 1:10
Размери ш/д/в. 420мм/860мм/350мм
Тегло 18.6 килограма
Задвижването е изпълнено с 4 броя постоянно токови двигателя с независимо възбуждане на 12 В с мощност 55 Вт 2900 об /мин. По един двигател за всяко колело с автономен редуктор ( предавателно число 3:1)диаметър на колелата 0.12 м .
Максимална мощност 220 ВТ
Максимална скорост 21.4 км/час
Автономия без включени слънчеви колектори при максимална скорост 13Км.
Пълно зареждане на батерийте 12часа от слъчевите колектори
Възможност за принудително зареждане от терминал на 220 В ( необходимо време за пълно зареждане 6 часа)
Спирачен път от максимална скорос до 5.5м
Светлинен идикатор за прегряване на крайните стъпала на системата за плавно регулиране на ускорението
Система против подхлезваене внедрена в системата за плавно ускорение
Система против блокиране на колелата при спиране внедрена в системата за плавно регулиране на ускорението.
Система против боксуване внедрена в системата за плавно регулиране на ускорението
Лебедка 12В 30Вт товароносимост 25Кг до 50% наклон при търкаляне.
Ръчно регулиране на клиренса –просвет от70мм до 45мм на преден и заден мост
Автоматичен тест на активното охлаждане при стартиране
Светлина за заден ход
Индикатор за пълна мощност
Автоматичен контрол на светлините за нощно виждане
Дистанционно управление
Автоматично регулиране на ускорението след задаване на направление
Устройство за почистване на предното стъкло с ръчно задействане
Алармена система с ръчно задействане (датчик за удар и против стартиране)
ТЕОРЕТИЧНА ЧАСТ
ПРОЕКТИРАНЕ И ИЗРАБОТВАНЕ НА ФИЗИЧЕН МОДЕЛ НА
АВТОМОБИЛ С ВИСОКА ПРОХОДИМОСТ
2.1 Проектиране и изработка на зхаранване.
Захрнването е осъществено с 2 броя паралелно свързни гелови батерий 12В 12А всяка.
Отрицателният полюс е свързан на маса. Положителният минава през контактор и след това на клемореда. Контактора се задейства от дистанционното управление и служи за включване и изклюяване на модела.Към положителната клема през автономни предпазители са присъединени всички оперативни и силови вериги на останалите консуматори в модела, съответно негативния полюс на консуматорите е даден на маса. Батериите са монтирани в метален стринг направен от окачвачи за гипсокартон. Едната батерия се скрива изцяло в него а другата се поставя върху първата , застопоряват се с гумени ластици. Стринга е разположен централно на количката и леко изнесен назад за по добър баланс на модела. Може да се види под предния таванен отсег.
Електрическата схемата се намира в приложение1 схема 1а
Схема 1б –Начертана е блокова схема на всички консуматори присъединени към клемореда.
Фотография на детайла може да се намери в Приложение 3 Фотография1
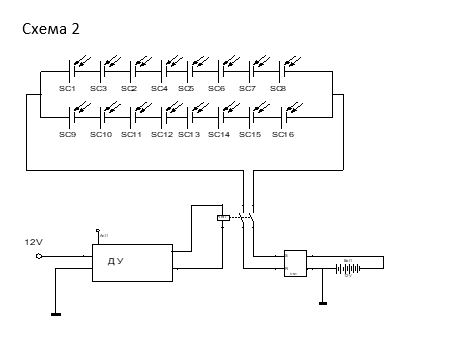
2.2 Проектиране и изработка на възобновяеми
изсточници на енергия с дистанционно управление.
Използавани са два паралелно свързани стринга слънчеви колектори с мощност 14.4W
Във всеки един стринг има по 8 последoвателно свързани колектора ТИП: (TRONY SO40430-4N GTF1-500) 1.75V/500mA. Колекторите са монтирани върху задния таванен отсег , здраво закрепени за капака. Присъединителните проводници минават от вътрешната страна на капака, на края влизат в жгут за да може да не се прещипват при отваряне и затваряне на капака. Ъглите на слънчевите колектори са намазани със черен силикон за по-добра стъбилност и предпазване от изместване при движение по неравно тресе. В схемата е заложен един оснивен елемент D N – полупроводников елемент който затваря прехода си при падане на напрежението под определена граница. Ако се стъмни и слънчевият колектор е забравен включен то DN прекъсва връзката между акомулаторната батерия и слънчевия колекектор. Необходимото време за пълно зареждане на батериите е 24 часа. Слъчевият колектор се задейства ръчно от дистанционното управление. За него е отделелен един двупозиционен канал при който с натискане на един бутон СК се стартира или преустановява работа. В страни от слънчевите колектори на същия капак е монтиран червен свто диод който индикира ,че слънчевите колектори са задействани. За да се задействат слънчевите колектори количката трябва да е изключена от дистанционното. Когато модела е изключен в режим на стенд бай остават включени Алармената система и дистанционното управление за стартиране на модела и включване на слънчевите колектори. За защита от механични повреди всеки отделен панел е покрит с тънко стъкло 3мм. Което прави панела много крехък. В инструкцията за експлоатация е описано. Опрератара да се отнася с особенно внимание при:
Преминаване под ниски храсти!
При преминаване по големи наклони където има опасност от преобръщане!
При настилки от чакъл и садържание на ситна фракция където има опасност от изхвърляне на ситни камъчета!
При преминаване по трасета с опсност от падащи предмети!
За защита при преобръщане е монтиран П образен ролбар между двата таванни капака. Който при преобръщане не позволява на модела да се закантари по таван. В единият случай ще се опре на ролбара и ръба на предния капак , а в другия на ролбара и ръба на задния капак. Защита от дребни механични повреди ( защитна мрежа) не е предвидена поради пявяване на засенчени участъци и понижаване на КПД-то на колекторите.
Схемата се намира в Приложение 1 Схема 2
Фотографията се намира в Приложение 3 Фотография 2
2.3 Проектиране и изработка на електрическа система за промяна на клиренса.
Тази система осигурява необходимият просвет на автомобила при различните условия на пътя .
Когато автомобила се движи през пресечени местности осигурява по голям просвет и съответно когато се движи по равен път за по голяма стъбилност при по висока скорост усигурява по малък просвет.
Редукторите на системата за промяна на клиренса са монтирани съответно над предния и над задния мост. Ще разгледаме само един от механизмите поради тяхната пълна автентичност. Подбрал съм Стандартен редуктор с цилиндрична форма и предавително число 150:1. Елекродвигателя е монтиран странично на редуктора и въртящият момент се предава посредством червячна предавка. Редуктора е монтиран така че изходният му вал да е вертикален. На него е монтиран червяк на който е навита гайка със съшата стъпка. На гайката посредством селенова втулка е захваната стъбилизиращата щанга. Тя представлява плътен Ф профил на който в двата му края са захванати горните части на двата макферсона. При стартиране на двигателя червяка който е на изхода на редуктора започва да навива или развива гайката която е присъединена за стабилизиращата щанга . Това е същността за повдигане на автомобила със запазване на динамиката. Когато червяка започне да развива гайката модела започва да се движи на горе и съответно когато червяка навива гайката модела започва да се движи надолу. В механичната система са заложени и двата крайни изключвателя - горен и долен. Селеновата втулка чрез която е присъединена стбилизиращата щанга за гайката позволява на окачването да си взаимодейства пряко т.е. Ако модела се движи по равено трасе с ниска скорост и на траекторията му има препядствие когато се качи само едната гума върху него усилието което ще се упражни върху макферсона от тази страна, в нашия случай ще се разпредели между него и съседния му макферсон или едната гума ако хлътне навътре в калника другата ще се отдалечи надолу от калника. Това ще запази шасито в максимално хоризонтално състояние, което би предотвратило : преобръщане , засядане или забиване на модела при големи препядствия. Защото по този начи центъра на тежестта се измества на необходимата в конкретния случай страна.
Кинематичната схема се намира в Приложение 2 Фигура 1
Електрическата схема за задвижване и реверсиране на ел. двигателя за задвижване на устройството за промяна на клиренса е изпълнена по подобен начин както и кормилната система , със контактори.
Има две групи контактори с по два контактора в група. ОК на 1-ви контактор от 1-ва група е свързан сОК на 2-ри контактор от 2-ра група и отиват на едната клема на вигателя. ОК на 2-ри контактор от 1—ва група е свързан с ОК на 1-ви контактор от 2-ра група и отиват на другата клема на ел. двигателя. Едните краища на четирите контактора са свързани на 2-ри извод на дистанционното управление. Другите краища на 1-ва група контактори са свързани към 1-ви извод на дистанционното управление като минават през изправителен диод и ЗК на крайния изключвател. Другите два края на контакторите от втора група също се свързват към 1-ви извод на дистанционното управление през ЗК на краен изключвател и изправителен диод но така ориентиран че когато е в състояние да работи 1-ва група 2-ра да не е и обратно. Котвите на двата първи контактора се свързват на клема + през предпазител , а котвите на двете втори релета се свързват на маса. От двата извода на дистанционното управлени се подават два сигнала с еднакво напрежение 5V и разнопосочен поляритет, което позволява реверсирането на двигателя. Контакторите работят на 5V/10A (подбрал съм стандартна стойност). Контакторите са необходими най-вече за галванична развръска между силовата верига и дистанционното управление , а също така и за усигуряване на необходимото за двигателите напрежение от 12V. Не е необходимо плавно стартиране на тази група двигатели за това те се захранват директно от клема +. Устройството за промяна на клиренса на предния и задния мост работят неделимо което означава че ако увеличаваме или намаляваме просвета не можем да го правим само за заден или само за преден мост.
Електрическата схема се намира в Приложение 1 Схема 3.
Фотографията се намира в Приложение 3 Фотография 3
2.4Проектиране и изработка на
стъклопочистващо устройство с датчик за автоматично и принудително включване.
Предвидено е място за монтиране на портативна камера
на предното стъкло.Затова на предното стъкло е монтирано стъклопочистващо
устройство с дистанционно задеистване. Чиято задача е да осигури видимост за
обектива при лоши климатични условия.
Двигателя на стъклопочистващото устройство е монтиран
на шасито. Можността му е 10W и рбот на 12V. Електродвигателя е с вграден
редуктор с предавтелно число 50:1. Въртящият момент от редуктора се преобразува
във възвратно постъпателно двивение посредством коляно мотовилков механизъм. На
оста на стъклочистачката също е монтиран коляномотовилков механизъм който
преобразува възвратно постъпателното движение от първия механизъм във
въртеливо. Това въртеливо движение осигурява на стъклочистачката движение по и
обратно на часовниковата стрелка на ъгъл от 90 градуса.
Фотографията се намира в Приложение 3 Фотография 4.
Дистанционното управление подава положителен сигнал на
котвената намотка на контактора.Котвата на контактора е свързана на клема + , а
нормално отворения контакт на контактора отива на едната клема на двигателя
през предпазител със стопяема вложка. Другата клема на ел. двигателя се свързва
на маса. Контактора в тази верига е подбран по стандартна стойност 5V/1A
Електрическата схема се намира в Приложение 1 Схема 4.
2.5 Проектиране и изработка на устройство за изтегляне на атомобила в авариини ситуации(лебедка).
Предвид лошите условия за които е проектирана колата е предвидено и устройство за изтегляне на автомобила при аварийни ситуации или затъване. Оборудвано е със стоманено въже и кука. При неибходимост въжето се развива ръчно и след това изтеглянето (навиването на въжето)се извършва дистанционно.
Лебедката
е монтирана в предната част на автомобила под предния ролбар. Електродвигателя
е с вграден редуктор 50:1 и е монтиран напречно на модела. На изхода на
редуктора е монтирана макарата на която се навива стоманеното въже.
На ролбара е монтиран метален водач който придържа въжето да не излезе от макарата при навиване без значение под какъв ъгъл е опората за която е закачено въжето. Лебедката се задейства с отделен бутон от дистанционното и не се влиае от това какво направление е зададено на модела.
Дистанционното управление подава положителен сигнал на котвената намотка на контактора. Котвата му е свързана на клема + . Нормално отворения му контакт е свързан с едната клема на двигателя през предпазител със стопяема вложка , а другата клема на елекртодвигателя е свързана на маса.
Електрическата схема се намира в Приложени1 Схема 5.
Фотографията се намира в Приложение 3 Фотография 5
2.6 Проектиране и изработка на автоматично включване и превключване на LED светлините за нощно виждане.
Автомобила е снабден с къси и дълги светлини с автоматично включване и превключване.
Късите светлини се сътоят от шест свтодиода разположени по три във фар. Диодите са свързани в две паралелни групи по три последувателно свързани диода със резистор в една група. Диодите са с консумация 15mA/3.5V. Устройството за атоматично включване е стандартна фотоклетка с вграден контактор в схемата , подава положителен сигнал с напрежение 12V. Управлява се от един фотодиод и има възможност за коригиране на чувствителността. Клетката е така регулирана че да се изключва само на пряка светлина.
Фотодиода е монтиран на покрива на автомобила и няма защита срещу механични въздействия което го прави застрашен елемент.
Дългите светлини се състоят също от шест диода. Два са разположени като допълнителни фарове и са монтирани на предния ролбар , а останалите четири като халогени на таванния роолбар. Схемата на свързване отново е на два паралелно свързани клона с по три последувателни светодиода и резистор в един клон. Фотодиода е разположен зад предната решетка така че да може ако отсреща идва друг автомобил с вградена камера и включени светлини да не блести в обектива.На тази схема също има възможност за коракция на чувствителността но за да може напълно дългите светлини да са синхронизирани с късите свтлини се налага и друга мярка. Мястото където целево е монтиран фотодиода е много по сенчесто от мястото на другия , затова от позитивният извод на първата фотоклеткаизвеждаме един проводник до котвената намотка на контакторът който също съм подбрал по стандартни стойности 12V/1A другият край на котвената намотка свързваме на маса. Котвата също я свързваме на извода на първата фотоклетка , а нормално отворения контакт на контактора свързваме на втората фотоклетка. Така дългите светлини могат да се задействат само когато късите светлини са активирани.
Електрическата схемана късите светлини се намира в Приложение 1 Схема 6а
Електрическата схема на дългите светлини се намира в Приложение1 Схема 6б
Фотографията се намира в Приложение 3 Фотография 6
2.7 Проектиране и изработка на стоп светлини ,светлина за заден ход.
Стоп светлините са разположени в задната част на автомобила под задното стъкло. Използвал съм четири червени светодиода.
При включване на модела стоп светлините светват , това указва че автомобила е в покои. Ако зададем на модела някакво направление напред или назад стоп светлините изгасват. Светодиодите са свързани в два паралелни клона по два светодиода и резистор във клон. Единият извод на котвената намотка на контактора е сързана на позитивния извод на дистанционното управлени за преден и заден ход а другият към маса. Котвата е свързана къъм клама + на захранването , а диодите са свързани на нормално затворения контакт на контактора. Потози начин когато колочката е включена и в покой стоп светлините работят.
Светлината за заден ход е монтирана в задната част на автомобила под задното стъкло изместена на ляво от центъра. За светлина за заден ход съп подбрал един свето диод със същите параметри като тези за фаровете. Във захранващата верига на светодиода има включено последувателно свързано съпротивлениеи след него преди диода и едно в паралел за да ограничи тока през диода понеже е само един диод.Захранването се подава през нормално отвореният контакт на контактора. Котвената намотка на контактора е свързана през изправителен диод към изводите на дистанционното управление за преден и заден ход. Така светлината за заден ход ще е галванично развързана от ДУ и ще задейства само при движение назад.
Електрическата схема на стоп светлините се намира в Приложение 1 Схема 7а.
Електрическата схема на светлината за заден ход се намира в Приложение1 Схема7б.
Фотографията се намира в Приложение 3 Фотография 7
2.8Проектиране и изработка на
алармена система.
Изградена е на базата на автомобилните алармени системи съпроводена е със светлинен и звуков сигнал и реагира на удар или необуснована консумаци на уредите в автомобила т.е. опит за стартиране от чуждо дистанционно управление.
Арармената система остава перманентно включена без значение дали е включена или изключена количката. Шоковият датчик е вграден в корпуса на алармената система. Червената светодиодна индикация е заменена с бяла и е изнесена зад предната решетка до левия фар. Системно алармената система след стартиране се активира за около 20 секунди. Има вграден напреженов индикатор който задейства алармата и при най малкото рязко колебание в напрежението. Следувателно ако бъде направен опит незабелязано да се отвлече количката от чуждо дистанционно ще се задейства алармата. В схемата на захранването е предвиден и имобилайзер който при задействане на количката без да е изключена алармата прекъсва захранването.За съжаление в модела последното не е изпълнено напълно , поради несъвършенство във алармената система с която разполагам.
Електрическата схема се намира в Приложение 1 Схема 8.
2.9 Проектиране и изработка на система за автоматична проверка на системите преди стартиране с LED индикатор за изправност.
При стартиране на модела време реле симулира сигнал към активното охлаждане и към степенния светлинен индикатор че е достигната критична температура в следствие на което аварийните системи се задействат и фактически показват на оператора че при евентуална реална ситуация ще сработят селективно т.е. при прегряване ще покажат на две сепени нивото на прегряване и при необходимост ще се задейства активното охлаждане.
Схемата се състои от транзисторно време реле с R,C групи за тайминга , захранването му е на 9V а на изхода излизат от 4.5 до 5V.Време релето е с еднократно задеистване т.е. ако натиснем бутона за задействане и го задържим , времерелето ще си отброи цикъла и ще спре докато не пуснем бутона и не го натиснем пак. Затов вместо бутон съм свързал двата проводника на нормално отворен контакт на контактора и на котвата а котвената намотка на маса и клема +. Когато вкючим модела от дистанционното се задейства еднократно и времерелето. На изхода му е свързан друг контактор който посредством котвата и нормално затворения контакт дава на късо двата края на терморезистора. Така система та за активно охлаждане задейства вентилаторите и светлинния индикатор за кратко. След като времерелето изброи зададения му цикъл освобождава терморезистора, вентилаторите и светлинния индикатор спират и светва жът светодиод разположен зад предната решетка до десния фар който указва че проверката е извършена.
Електрическата схема се намира в Приложение 1 Схема9.
2.10Проектиране и изработка на електрически диференциал .
Изграден е на базата на кръстосаните отрицателните обратни връзки помежду модулите за плавно регулиране на оборотите.
Всеки един тягов двигател има собствен модул за плавно регулиране на оборотите. Спомоща на една отрицателна обратна връзка от ляво колело към едно дясно и от същото дясно към даденото ляво се получава такава зависимост между оборотите на ТД каквито са при механичният дъференциал. На ляв завой при движение напред. Лявото олело изминава по малко път от колкото дясното. При ТД чието колело изминава по малко път се получава пад на напрежение. Реално какво става след това! На входа на предусилвателя на крайното стъпало се свързва един резистор с определена стойност. Тзи стойност се подбира така че като другият край на резистора се свърже на маса прехода на транзистора да остане отворен , на такъв процент че ТД да не може да достигат свръх обороти. Може да се разгледа и един вид като ограничител на обороти. Стойностите трябва да са максимално равни , за това се препоръчва да се подбират такива стойности на резисторите че като се навържат няколко в паралел да се получи търсената стойност. Потози начин се прави уравновесяване между фабричните отклонения в стойностите на резисторите.
От тук насетне като сме сигурни че двата ТД ще се въртят с една и съща ъглова скорост можем да продължим нататък. Ако ъгловата скорост на някой ТД се повиши ще се повиши и напрежението във веригата му. Което означава че по голяма част от входния сигнал ще се разсее през резистора на отрицателната обратна връзка и транзистора на предусилвателя на крайното стъпало ще се затвори с няколко процента което ще доведе до понижаване на ъгловата ччестота на отсрещния ТД. Ако опитаме да влиаем на един тягов двигател със собствената му отрицателна обратна връзка то той би бил самоограничен на определенни обороти. Като горната граница е строго определена а долната е с много малък толеранс без значение дали натоварването се увеличава или намалява.Ако натоварването на ТД нарастне той ще намали оборотите си което автоматично води до по пълно отпушване на предусилвателя а от там крайното стъпало подава повече ток за да компенсира натоварването същото важи и за обратната развръзка. В случая ние целим точно обратното ако левият ТД намали оборотите си, десния ТД да увеличи пропорционално своите. По този начин модела ще може да завива без да се подхлъзва или повлича на завой. Което е основната цел.
Има една особенност за осигуряването на отрицателната обратна връзка и тя е че тяговия двигател реверсира чрез обръщане на поляритета. Сега ще обясня принципа на действие на реверса за да стане ясно и точно как вземаме ООВ.
Дистанционното управление което съм подбрал реверсира или по точно наслагва два канала на два проводника на изводите като веднъж единият проводник е + а после – аналогично е и за другия.На извода на дистанционното управление напрежението е 5V а модула за плавно регулиране се захранва с 12 V . За това на изводите на ДУ свързваме котвената намотка на един контактор със стандартни параметри 5V/1A , той ще задейства без значение как е ориентиран поляритета. На нормално отворения му контакт свързваме захранващт позитив за модула за плавното регулиране на оборотите като последувателно веригата е защитена от предпазител със стопяема вложка.В момента в който от ДУ се подаде сигнал напред или назад свободно свързаният контактор сработва и подава напрежение на модула за плавно регулиране.
От модула за рег. На оборотите излиза един положителен извод който минава през R,C група за автоматично повишаване на напрежението. Като следваща стъпка имаме два контактора с нормално отворени и нормално затворени контакти. НЗ на единия контактор се свързва с НО на другия, съответно така се свързват и другите два, на котватана единия контактор се подава + от модула за управление на оборотите , а котвата на другия се дава на маса - . към двигатела се свързват по следния начин НЗ-НО-(+) и НО-НЗ(-). Отделно котвената намотка се свързва към извода на дистанционното управление , но последувателно на паралелното свързване на котвените намотки се свързва един изправителен диод. Този диод не позволява в едно от двете положения на ДУ контакторите да сработят в такъв случай да приемем , че прес НЗ контакти на двата контактора ще се подаде напрежение на ТД в едната посока. И След подаване на реверсиран сигнал от ДУ , Контакторите ще сработят и ще подадат напрежение на тяговите двигатели през НО контакти съответно в обратна посока. По същия начин сфазирам отрицателната обратна връзка към полюсите на таговия двигател независимо в коя посока се върти той. Използвал съм контактор чиято котвена намотка е свързана паралелно към другите два , последувателно през изправителния диод.контакториете които съм използвал са 12V/10A. А предпазителите със стопяема вложка се по 6.3А.
Електрическите схеми се намират в Приложение 1 Схема 10а.
Схема на управлението за плавно регулиране на ускорението. Това е схема с общ дрейн , известна е като сорсов повторител . Входния сигнал се подава между гейта и дрейна а изходния между сорса и дрейна. Схемата притежава голямо входно съпротивление и малко изходно. Коефициента на усилване по напрежение е по малък от 1. Получава се право пропорционална зависимост м/у тока и напрежението което предпазва ТД от прегряване при голямо натоварване и ниски обороти. Отрицателната обратна връзка осигурява обратна пропорционалност между напреженията на два срещуположни ТД от което се получават и зависимостите за системите за стaбилизиране на автомобила.R,C групата на изхода на крайното стъпало служи за плавно увеличаване на стойността на напрежението от 0 до определена граница за определено време което осигурява автоматично плавно дистанционно ускорение.
Електрическата схема на управлението за плавно регулиране се намира в Приложение1 Схема0б
Електрическата схема на реверсирането на ТД се намира в Приложение 1 Схема 10.в
2.11 Проектиране и изработка на система против подхлъзване.
При подхлъзване на автомобила на ляв завой т.е. автомобила се отклонява на дясно от траекторията си , задно дясно и предно ляво колело увеличават оборотите си като в последствие на това автомоибла запазва направлението в което му е оказано да се движи.
Като се има в предвид че колелото довело до подхъзване е увеличито оборотите си в следстрвие на подхлъзването.
Аналогично е и за десен завой.
Системата е осъществена на базата на кръстосани отрицателни обратни връзки взаимодеистващи с електрическия диференциал
2.12 Проектиране и изработка на система против боксуване.
На база изградените кръстосани отрицателни обрати връзки и ел. диференциала
Не се позволява достигането на по високи обороти само от един двигател като контролната величина за това е напрежението.Ако колелата на предната или задната ос увеличат ъгловата си скорост то другите две или ще увеличат своята ъглова скорост до тази на боксуващите или босуващите ще синхронизират своята с тази на колелата с по добро сцепление
2.13 Проектиране и изработка на антиблокираща система.
За сработването на тази система е достатъчно само едно от четирите колела да има сцепление с пътя. Когато автомобила премине в режим на рекупертивно спиране енергията която определена да се върне в енергоизсточника може да се отдаде и да компенсира дадено колело.
Т.е ако сцеплението на дадено колело не е достатъчно за да осигури еднаква ъглова скорост на всички задвижващи колела то част от енергията произведена от останалите колела ще синхронизира ъгловата скорост до тази която има колелото с най голямо сцепление което усигурява по кратък спирачен път при влошени условия.
Всички тези системи се обуславят на кръстосаните отрицателни обратни връзкикоито влиаят на отпушването на преходите на крайните транзистори на управлението за плавно ускорение, като при зададената геометрия на модела пътя който изминават предно ляво и задно ляво колело, съответно предно дясно и задно дясно колело е еднакъв на базата на това се основава ел диференциала и останалите зависимости които формулирах като отделни системи.
2.14 Проектиране и изработка на индикатор за мощност.
За контролна величина на оборотите на тяговите двигатели се използва напрежението подавано към тях .За това като индикатор за пълна мощност се използва светлинен нивоиндикатор на напрежение който се задейства при доближаване до номиналното напрежение. В случая използваме контактор на 12V/1A. В котвената верига на контактора е свързан потенциометър с които се ограничава напрежението. Понеже от акомулаторите напрежението е 14.4V има опастност за котвената намотка на контактора.Прага на сработване е след 13V. Това се налага понеже няма стандартни контактори които да работят на 14.4V. Свето индикатора е изграден от 4 броя червени крушки с мошност 0.25W свързани в паралел 2 по 2 и са монтирани в отворите за отвеждане на загрятият въздух от радиаторите на крайните стъпала на модула за плавно регулиране на оборотите. Намират се в задната част на модела и са оформени като ауспуси.
Електрическата схема се намира в Приложение 1 Схема11
Фотографията се намира в Приложение 3 Фоторгафия 8
2.15 Проектиране и изработка на спитачна система.
Окончателното спиране на автомобила се осъществява с помощта на включване на резисторна група към всеки ТД.
Проводника с който е навит ротора на ТД е 1 квадрат на теория през проводник с такова сечение може да се пропуска ток 5A без да се поврежда проводника. От тук съм изходил че ако максималният консумиран ток от ТД е 4.5A. Включване на резистор със съпротивление 10Ω няма да навреди на двигателя и се приближава най близо до режим на късо съединение на клемите на ел. мотора. В този модел не се прилага противовключване. При тази скорост и маса на автомобила се получава много добър спирачен път. При необходимост има възможност и за противовключване но то се прави ръчно от дистанционното управление. Противовключването не може да бъде опасно за ТД защото връзката с товарните резистори е защитена от предпазители със стопяема вложка , а също така и силовата верига е галванично развързана от дистанционното управление.
За стъбилно позициониране на модела когато искаме да го оставим под наклон товарните резистори са постоянно свързани в паралел с тяговите двигатели през нормално затворените контакти на контактор чиято котвена намотка е свързана във веригата на извода от дистанционното управление за движение напред и назад. В момента в който зададем посока на движение контактора се задейства и разделя връзката на товарните резистори с тяговите двигатели.
2.16 Проектиране и изработка на индикатор за прегряване.
Индикатора се намира зад предната решетка под предния капак в две светлини вда червени свето диода и осем зелени. Интензитета на светене е с две нива и зависи от степента на прегряване.
Диодите са свързани последувателно със токоограничителен резистор и един последувателно свързан във веригата. Подават им се директно от 9V до 12V от модула за управление на активното охлаждане паралелно с вентилаторите.Индикатора се задейства винаги при стартиране на модела. Първо светват по интензивно след няколко секунди намалява интензитета и след още няколко секунди угасват. Целта на тези индикатори е само за висуална ориентация какво се случва с модела ако наоколо е много шумно и не се чуват вентилаторите.
Електрическата схема се намира в Приложение 1 Схема 12.
Фотографията се намира в Приложение 3 Фотография 9.
2.17 Проектиране и изработка на устройство за принудително зареждане от мрежата.
Зарядното устройство е вградено в автомобила.
Максималния заряден ток е 3А на 15V.
Захранването е с изправено филтрирано и стабилизирано напрежение. Оборудвано е с мрежов филтър , предпазител със стопяема вложка и максимално напреженова защита
За по голяма компактност е изпълнено с делител на напрежение а не с трансформатор. Зарядното устройство е монтирано в пластмасова кутия и захванато в задната част на купето.
Електрическата схема се намира в Приложение 1 Схема 13.
2.18 Проектиране и изработка на Модули за управление и конвертори.
В модела са изпозвани основно два вида конвертори.
Единият на 9V а другият на 5.5V като реално ползвам 5 волтов конвертор с
повдигната маса.
За 9 волтовият конвертор съм предвидил един
неелектролитен кондензатор за входа един електролитен за изхода и още един
неелектролитен за изхода в паралел на елекролитния за намаляване на вътрешното
му съпротивление. Кондензаторите са предвидени за да работи схемата без да
генерира смущения и така да влиае на дистанционното управление и неговия
обхват.
За 5.5 волтовия конвертор също има заложени
кондензатори в схемата му. На средния крак който се свърза директно на маса ,
последувателно е свързан един линеен потенциометър за финно регулиране. Понеже
конвертора е за 5V за да получим 5.5V трябва да увеличим съпротивлението през
потенциометъра , колкото повече увеличаваме съпротивлението толкова повече
напрежението изхода се доближава до напрежението на входа.
Този подход не е много препоръчителен ако изсточника
на енергия не е химичен, защото с тази повдигната маса ние намаляваме
чувствителността му и при всеки един пик на напрежението и неговото
стъбилизирано напрежение ще е плаващо.
Електрическата схема се намира в Приложение 1Схема 14а
и 14б.
Основният и най важен модул в автомобила е модула за
плавно регулиране на оборотите.
Това е схема с общ дрейн , известна е като сорсов повторител . Входния сигнал се подава между гейта и дрейна а изходния между сорса и дрейна. Схемата притежава голямо входно съпротивление и малко изходно. Коефициента на усилване по напрежение е по малък от 1. Получава се право пропорционална зависимост м/у тока и напрежението което предпазва ТД от прегряване при голямо натоварване и ниски обороти. Отрицателната обратна връзка осигурява обратна пропорционалност между напреженията на два срещуположни ТД от което се получават и зависимостите за системите за стaбилизиране на автомобила.R,C групата на изхода на крайното стъпало служи за плавно увеличаване на стойността на напрежението от 0 до определена граница за определено време което осигурява автоматично плавно дистанционно ускорение.
Електрическата схема се намира в Приложение 1 Схема 14.в
2.19 Проектиране и изработка на шаси.
Шасито е изпълнено от кръгъл плътен профил ф8 .
Фотографията се намира в Приложение 3 Фотграфия10
2.20 Проектиране на ходова част.
Ходовата част е конфигурирана с два носача (долен и горен) една не пружинна стъбилизираща щанга централно застопорена от механизма за промяна на клиренса и директно въздействаща върху срещуположното колело . Окачването е с независимо предно спрямо задно окачване. Окачването е реализирано с по една пружина и обратно действащ амортесьор на колело.
Носачите са изработени от плътна заготовка ф4 .
Стъбилизиращата щанга е изработена от плътна заготовка ф8.
Кинематичната схема на носача се намира в Приложени2 Фигура 2а.
Фотографията се намира в Приложение 3 Фотграфия 11
Кинематичната схема на предна главина се намира в Приложение 2 Фигура 2б.
Фотографията се намира в Приложение 3 Фотграфия 11.а
Кинематичната схема на задната глевина се намира в Приложение2 Фигура 2в. Фотографията се намира в Приложение 3 Фотграфия 11.б
Кинематичните схеми на основните шарнирни връзки се намират в Приложение 2 Фигура 2г
Фотографията се намира в Приложение 3 Фотграфия11.в
2.21 Проектиране на окачване.
Амортесьора и пружината са куплирани в тип макферсон
Пружината е с 12 бр. навивки и дебелина на телта 3.5 мм. Вътрешен диаметър 8мм. Пружината е изцяло цилиндрична оформени легла в краишата.
Амортесьора е газов който при наколко хода се наомпва сам. Състои се от металан цилиндър и метално бутало с гумен опръстен , в горната част на цилиндъра след поставяне на буталото се завива ограничителна гайка по вътрешния диаметър на цилиндъра която също има гумен опръстен и уплътнява на стеблото на буталото долният обем на амортесьора е отворен а горния напълно затворен.
Кинематияна схема на макферсона се намира в Приложение2 Фигура 3.
Фотографията се намира в Приложение 3 Фотграфия 12
2.22 Проектиране на задвижването .
На всяко колело има по един тягов двигател. Той е
куплиран на редуктор с предавателно число 3:1. Всички оси в редуктора са
снабдени с радиални капсоловани лагери и
от двете страни.Редуктора се състои от две зъбни колела едното е двигателното а
другото е предавателното.
За предаване на движението към колелата е използвана титаниева полуоска от две части с каре от всяка стана и със стоманена вилка за компенсиране на аксиалните отклонения търкалящите и триещите се части са защитени с маншони.
Кинематичната схема на задвижването се намира в Приложени2 Фигура4 Фотографията се намира в Приложение 3 Фотграфия 13
2.23 Проектиране и изработка на кормилната уредба.
Електрическата схема за задвижване и реверсиране на ел. двигателя за задвижване на кормилната система е изпълнена по подобен начин както устройството за промяна на клиренса , със контактори.
Има две групи контактори с по два контактора в група. ОК на 1-ви контактор от 1-ва група е свързан сОК на 2-ри контактор от 2-ра група и отиват на едната клема на вигателя. ОК на 2-ри контактор от 1—ва група е свързан с ОК на 1-ви контактор от 2-ра група и отиват на другата клема на ел. двигателя. Едните краища на четирите контактора са свързани на 2-ри извод на дистанционното управление. Другите краища на 1-ва група контактори са свързани към 1-ви извод на дистанционното управление като минават през изправителен диод и ЗК на крайния изключвател. Другите два края на контакторите от втора група също се свързват към 1-ви извод на дистанционното управление през ЗК на краен изключвател и изправителен диод но така ориентиран че когато е в състояние да работи 1-ва група 2-ра да не е и обратно. Котвите на двата първи контактора се свързват на клема + през предпазител , а котвите на двете втори релета се свързват на маса. От двата извода на дистанционното управлени се подават два сигнала с еднакво напрежение 5V и разнопосочен поляритет, което позволява реверсирането на двигателя. Контакторите работят на 5V/10A (подбрал съм стандартна стойност). Контакторите са необходими най-вече за галванична развръска между силовата верига и дистанционното управление , а също така и за усигуряване на необходимото за двигателя напрежение 12V. Не е необходимо плавно стартиране на тази група двигатели за това те се захранват директно от клема +. за усигуряване на необходимот за двигателита напрежение 12V. Не е необходимо плавно стартиране на таги група двигатели за това те се захранват директно от клема +.
Двигателя на кормилната уредба е разположен надлъжно на модела в предната част той е идентичен с Тяговите двигатели и има вграден редуктор 50:1. На изхода на редуктора е монтирано зъбно колело , което се зацепва в гребена , това е рейката. Гребена е фиксиран от здраво от двете му страни отнети са му всички степени на свобода освен една транслация , на ляво и надясно. От двете страни на гребена са захванати вътрешните накрайници , от тук гайка с лява резба от едната страна и дясна от дугата страна , която служи за регулиране на предницата. От другата страна на гайките се навиват външните накрайници , а те се присъединяват към предната главина посредством шарнири. На долната част на гребена е прикачена „Г” образна планка предназначена да задейства крайните изключватели.
Електрическата схема се намира в Приложение 1 Схема15
Кинематичната схема на кормилната уредба се намира в Приложение2 Фигура5
Фотографията се намира в Приложение 3 Фотграфия 14
2.24 Проектиране , оразмеряване и изработка на силовите вериги.
Захранващите проводници на тяговите двигатели са
подбрани по стандартна стойност. С презапасяване съм подбрал многожичен
двужилен проводник със сечение 2
за тяговите двигатели и двигателя за
кормилната уредба. Проводниците за устройството за промяна на клиренса ,
лебедката и устройството за почистване на стъклото са със сечени 1.5
. Проводниците за
вентилаторите са със сечение 0.5
. Проводниците от устройството за принудително
зареждане до батерията и от слънчевите колектори до батерийте са също 2
. Присъединителните проводници от акомълаторите
до захранващите клеми са 6
.
Предпазителите които съм предвидил в силовите вериги
са: 6A;2A;1.5A
2.25 Проектиране , оразмеряване и изработка на оперативните вериги.
Най-големият консуматор във оперативните вериги има консумация 200mA поради което съм подбрал многожичен едножилен проводник със сечение 0.25
Предпазителите които съм уползотворил в оперативните вериги са:
1A;0.5A.0.2A
2.26 Проектиране и изработка на пасивно и активно охлаждане.
Като се вземе на в предвид сумата от разсейваната
мощност на крайните стъпала , размера на
пасивното охладително тяло и малкото място с което разполагам за активно
охлаждане съм подбрал 2 вентилатора с
дебит 2 кубични метра в минута. Което е напълно достатъчно за поддържане
на по ниска от 70 градуса температура при пълно натоварване. Вентилаторите са с
размери : 45мм/в ;45мм/ш ;25мм/д.
Пасивните охладители са луминиеви плочи с размери 150мм/25мм/5мм/
и по 8 едностранно разположени ребра с размери 150мм/20мм/ 2мм/.
За DC-DC конверторите се използват само пасивни
охладители. Също алуминиеви с размери 50мм/ 30мм/ 3мм/ и десет броя ребра с
размери 30мм/10мм/2мм/.
Електрическата схема се намира в Приложение 1 Схема 16
Фотографията се намира в Приложение 3 Фотография 15
2.27 Проектиране и изработка на повърхностни дтайли(калници , врати , предна и задна маска, капаци , таван, дифузьори , решетки , огледала.
Повърхностните детайли са изработени от перциглас 4мм. Извивките са направени с горещо огъване.
Детайлите са присединени към шасито с метални планки и болтове поставени отвън
навътре преди китосването на детайлите.
Стъклата са изработени от черен непрозрачен перциглас
2мм. Монтирани са преди другите повърхностни детайли и са лепени за рамките със
силикон.
Фотографията се намира в Приложение 3 Фотография 16
2.28 Проектиране и изработка на предпазни ролбари.
В предвид тежките терени за които е предвиден модела
са израбоени преден и заден ролбар които да предпазват предната и задната част
на автомобила от механични въздействия. За предпазване на соларните панели е
предвиден и един „П” образен ролбар на тавана. Предпазните ролбари са горещо
огънати и директо заварени за шасито. На предния ролбар е монтиран водача за
въжето на лебедката. Ролбарите са проектирани по готов модел с минималми
изменения.
Фотографията се намира в Приложение 3 Фотография 17
2.29 Проектиране и изработка на дистанционно управление.
За дистанционното управление са използвани две еднакви
4 канални дистанционни управления кат работната честота на едното е променена
за да не си влиаят едно на друго.
Едното служи за движение:
1 напред
2 назад
3наляво
4 надясно
Другото:
5 лебедка
6 стъклочистачка
7 у-о за промяна на клиренса надолу
8 у-о за промяна на клиренса нагоре
Освен тези се използват още две дистанционни
управления едното е двуканално – двупозиционно то служи за:
9 вкл. и изкл. На модела
10 вкл. и изкл. На соларните панели
А другото служи за:
11 вкл. и изкл. на алармената система
За корпус съм използвал корпуса на едно от
дистанционните , вътре в него съм интегрирал останалите , захранването им е
общо.
Фотографията се намира в Приложение 3 Фотография 18
2.30 Проектиране и изработка на джанти и гуми.
Подбрани са стандартни пластмасови джанти със плътни
гуми с посока. Размерът е 160 мм диаметър
И 100 мм ширина. Това е максималният размер гуми които
може да се поставят без опират в калниците.
Джантите са присъединени за главините посредством три
болта М4
Фотографията се намира в Приложение 3 Фотография 19
ИЗПИТВАНЕ НА МОДЕЛА
3.1 Проходимост.
Модела е изпитван на равен терен
Пресечена местност
Мокър и кален терен
При заснежена
настилка
С цел проверка на издръжливостта на окачването. Моето
заключение е че всеки терен е строго индивидуален при различните скорости.
Фотографиите се намира в Приложение 3 Фотография 20
3.2 Спирачен път.
Поради малкото съпротивление на спирачните резистори.
В режим на спиране тд почти се дават на късо което осигурява много добър
спирачен път. До пет метра от максимална скорост.
3.3 Ускорение.
При равен път и напълно заредени батерии за достигане
на максимална скорост са необходими 12.6
- 13 секунди.
3.4 Автономия.
С напълно заредени батерии , при максимална
мнощност и средна трудност на трасето
2 – 2.5 километра
ИНСТРУКЦИЯ ЗА ЕКСПЛОАТАЦИЯ
На база
конструктивните и схематични особенности , а също така и с помоща на
резултатите от проведените изпитания. Посочвам следните правила които трябва да
се спазват за правилната експлоатация на модела.
Преди
стартиране изключете алармата , изключването е съпроводено с три кратки
светлинни сигнала от свето индикатора на алармата.
След
стартиране на модела изчакайте да светне оранжевото диодче зад предната решетка
, тогава модела е готов за експлоатация.
Рейката е
така усроене че не връща предните колела в право положение след потегляне
оператора постоянно контролира направлението.
Опрератара да се отнася с особенно внимание
при:
Преминаване под ниски храсти!
При преминаване по големи наклони където има
опасност от преобръщане!
При
настилки от чакъл и садържание на ситна фракция където има опасност от
изхвърляне на ситни камъчета!
При
преминаване по трасета с опсност от падащи предмети!
Оператора
да внимава и да се стреми да не се движи странични по големи наклони а по
възможност по диагонал. Опастност от преобръщане.
Да се
избягват дълбоко наводнени участъци и по възможност да се преминава с ниска
скорост. Опастност от овлажняване на електрониката.
По равно
трасе да не се прави опит за преодуляване на препядствия с по голяма височина
или дълбочина от колкото е височината на колелетата.
В случай
на изтущаване на батериите да не се пускат соларните панели без да е угасена
количката.
Не
трябва соларните панели да работят докато модела се движи.
МАТЕРИАЛНА БАЗА
За изработката на модела са използвани следни
инструменти:
1 Настолна бормашина
2 Ъглошлаиф
3 Зеге
4 Мини шлайфачка
5 Електрожен
6 Бренер (за нагряване)
7 Поялна станция
8 Мултицет
9 Щрихова мярка за дължина
10 Термометър
11 Хронометър
12 GPS
13 Комплект метчици
и плашки
14 Ръчни инструменти
15 Стругарски услуги
ДОСТАВЧИЦИ
1
Петров електроникс
2 Елимекс
3 Конрат електроникс
4 Сън систем
5 Бау мак
6 Багира
7 Др Скраб
ЛИТЕРАТУРА И НОРМАТИВНИ ДОКУМЕНТИ
Електрозадвижване – Л.Българанов , И.
Миленов , Г. Павлов , Ч. Джамбазки
Електронно управление на електрически
машини-С. Давидов
Електрически апарати-А. Александров
Приложна механика-П. Колев , Д.
Патьов , А. Димитров
Полупроводникова техника-А. Шишков
Библиотека за радиолюбителя-К.
Витанов
Conrad
electronic Voller ideen – Modellbau 2009/10
Аз
ремонтирам Р А – издателство техника И. Ковал
Машинни елементи курсово
проектиране-П.Ненов , Д.Андреев , П.Стаматов , К.Димитров , И.Спасов
Радиопредавателна техника и
радиорелейни линии-Х.Тихчев
Приложение 1






















Приложение 2









Приложение 3























Няма коментари:
Публикуване на коментар